
Designing and testing controllers for novel assistance methods based on neurorehabilitation principles.
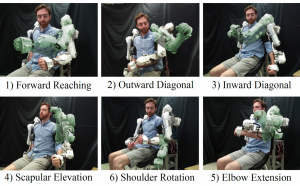
Investigating new treatment paradigms for stroke rehabilitation using a bilateral upper-limb exoskeleton with active shoulder support and compliant behavior.
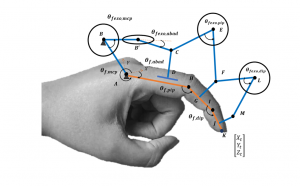
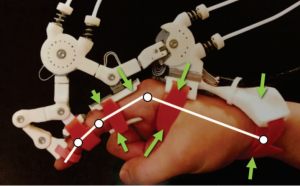
Fingertip position and force control for dexterous manipulation through model-based control of hand-exoskeleton environment.

Designing adaptive curriculum-based training protocols for novel motor task learning.
Optimize comfort and effective force transfer in coupled human-robot systems by modeling interaction dynamics at physical human robot interfaces.
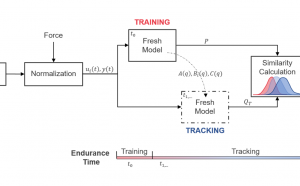
Improving fatigue assessment techniques during robot-mediated exercise via monitoring of the interplay between muscle activity and human movement over time.
We aim to acquire safe and robust dexterous manipulation through reinforcement learning while making informed hardware design choices that guarantees stability and safety.
Using muscle intent recognition from brain signals to control hand movements for spinal cord injury patients.