Despite mechanical advancements in assistive hand exoskeletons, the manipulation ability they provide has remained far inferior to that of a healthy human hand. State of-the-art control strategies are mainly focused on robot joint level position control and vague trajectories for whole-hand movements, although accurate control of fingertip positions and forces is required for human-like dexterity. Due to nonlinear relationships between inputs and outputs, dexterous manipulation requires accurate models of interaction between the fingers, the exoskeleton, and the fingertip space. In this research, we utilize model-based control to achieve desired fingertip position and forces with a multi-degree-of-freedom (multi-DOF) exoskeleton for the first time.
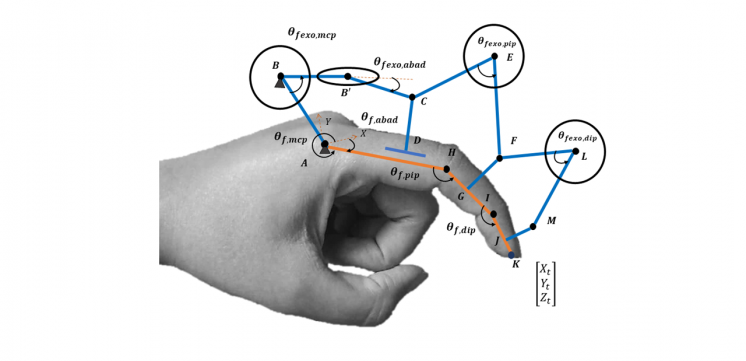
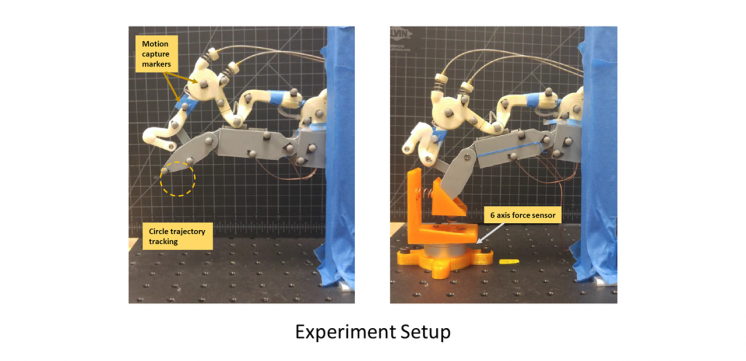
We have enabled accurate fingertip position and force control through model-based control of the hand-exoskeleton system which includes (i) hierarchical model of the finger consistent with the biomechanics (ii) Interaction model between the exoskeleton design and the hand, and (iiI) a model of the Bowden cable series elastic actuation (SEA) to compensate for slack and losses in the actuation. We tested the results for trajectory tracking and force tracking scenarios in simulation and experiment. Then, we compared the proposed model-based control method with conventional simple feedback-based control methods on showed its performance to be superior than the state-of-the-art control methods and within human accuracy levels. We plan to extend our modeling and control work to include multi-finger object interaction and adaptive control to optimize for model parameters.
