
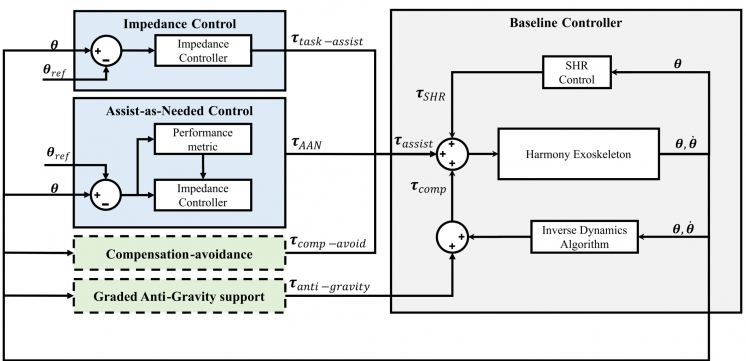
Stroke survivors often exhibit decreased ability to perform daily activities. Rehabilitation focuses on training patients to achieve independence. Function-based and impairment-based approaches are two prominent directions investigated in post-stroke upper-extremity rehabilitation. The first focuses on functional improvements and the latter focuses on impairment reduction. No research has been conducted to examine the effects of these two contrasting training approaches. There is a need for a specialized and powerful tool to carry on this investigation. The goal of this work is to develop a suite of measurement and therapeutic features that will allow examination of function-based and impairment-based training. Currently, Harmony’s baseline controller includes a feedforward term that captures inverse dynamics to compensate weight and friction and enhance transparency and a feedback term to track the shoulder movement with the correct coordination. Additional actuation currently implemented in Harmony includes impedance control for trajectory tracking to provide task-assistance and impedance-based assist-as-needed strategy to adjust assistance amount according to the wearer’s performance. We are designing and testing controllers to address two key missing features to support these training approaches in Harmony exoskeleton: graded anti-gravity support and compensation-avoidance. This will create exciting possibilities in the stroke rehabilitation research, allowing for new experimental interventions that can lead to novel interpretations of the underlying mechanisms of motor recovery after stroke. This is an important step towards investigating novel interventions that can maximize functional recovery of stroke patients and promote greater independence in their daily lives.
Collaborators
