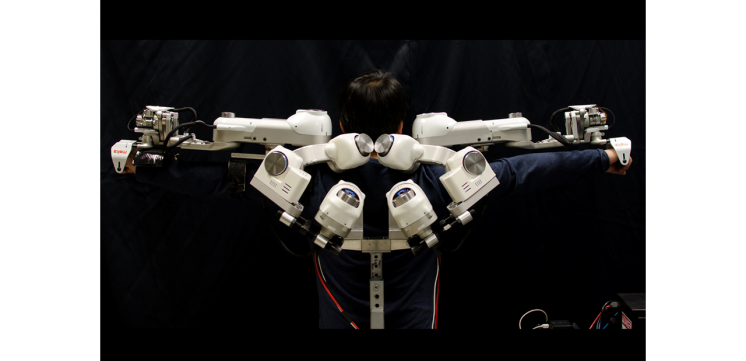
Stroke causes long-term disability that can be improved with rehabilitation. Robotic rehabilitation interventions have been shown to be better or equivalent to conventional therapy, but they must be biomechanically compatible with natural shoulder coordination to prevent serious negative effects. We are investigating new paradigms for stroke rehabilitation treatment and assessment using Harmony, which is an exoskeleton that provides active shoulder support and offers gravity compensation and compliant assistance.
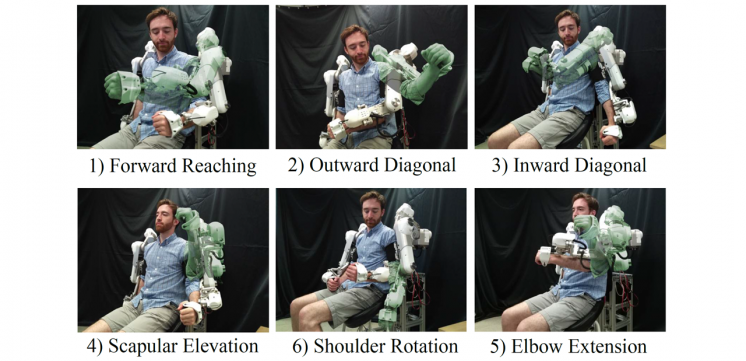
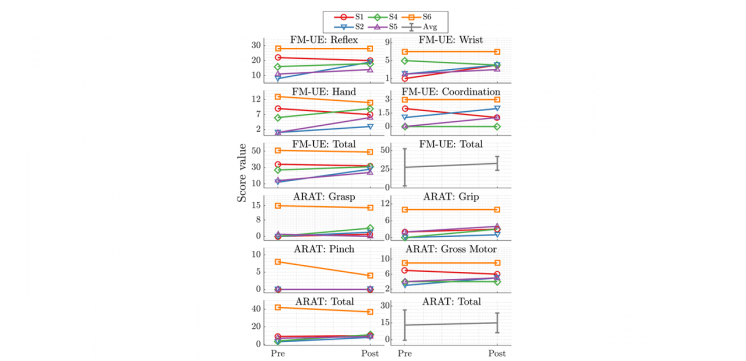
We have tested Harmony with 6 stroke patients during several multi-joint movements, and we have shown that it safely assisted patients while maintaining proper shoulder girdle coordination and successfully avoiding shoulder subluxation. Some participants demonstrated clinically significant improvements in the Fugl-Meyer, and one participant exhibited changes in active range of motion and effort. The results observed in these small studies motivate future efforts for larger clinical trials to gain statistical support. We are also working towards characterizing Harmony’s accuracy for assessment, which can enable therapists to objectively identify individual limitations and develop targeted interventions.





