Coupled human-robot systems can serve many functions: Rehabilitative robots for therapeutic exercises and quantitative patient assessment, assistive robots to augment human function, and robotic haptics platforms which could be the future of virtual reality.
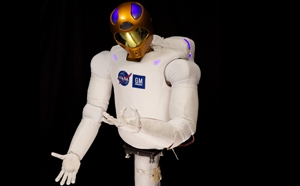
Developing active control and passive mechanical elements to improve grasping and manipulation capabilities of robotic hands

Developing active control and passive mechanical elements to improve grasping and manipulation capabilities of robotic hands
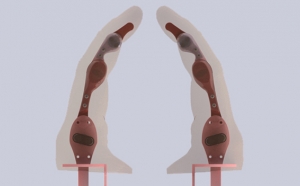
We seek to design a new generation of robotic hands with human-like compliant fingers
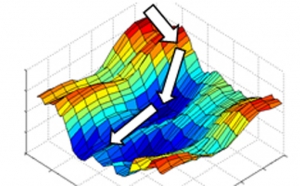
To develop a statistical model-based control algorithm called CRROS which resolves an unreliability problem of a statistical model

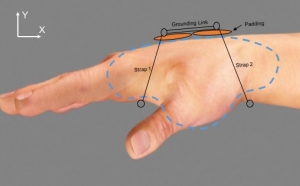
Understanding the nonlinear passive dynamic properties of human hands.

Incorporates neuromusculoskeletal aspects of the anatomy that are functionally crucial in order to use control signals that resemble the neural commands