

Human fingers possess a remarkable anatomical feature: their muscles have high tendon-muscle fiber ratios across multiple joints at upper limbs. Passive compliance of human hands from the muscles and soft tissue plays an important role in accomplishing various tasks in daily life. This project is focused on understanding the nonlinear passive dynamic properties of human hands. The discovery of these biomechanical properties can enhance the design of a variable impedance mechanism for robotic hands in joint and tendon space. The objectives of this project include:
- Hand Modeling: A comprehensive model of human hands is being built to investigate the effects of the passive nonlinearity of the components such as the muscles and the soft tissues across the fingers.
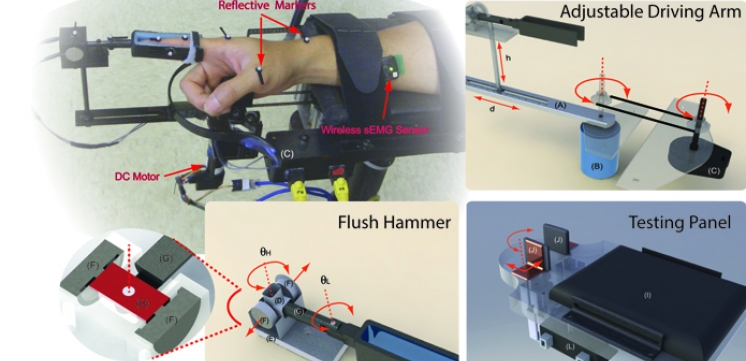
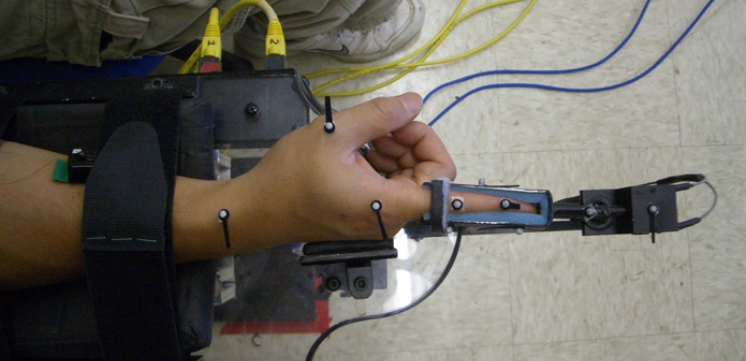
- Experiments from Human Subjects: A mechanism integrated with a motion capture system and an electromyography system to collect experimental data from the index fingers of human subjects was designed.
- Variable Impedance Mechanism: By mimicking the passive properties derived from the human hand experiments, a novel mechanism is being designed with variable impedance for the robotic hand joints and tendon-driven system. The purely mechanical unit will introduce the human-like passive stiffness and damping profile into robotic hand design.
Related Publications:
