
Coupled human-robot systems are used for various applications such as rehabilitation, human augmentation, and haptics. In many cases, attachment interfaces between the robot and the human are oversimplified and assumed to be perfect rigid connections. In reality, physical human robot interaction (pHRI) interfaces experience relative movement and residual forces due to viscoelastic properties of skin, underlying soft tissue, and compliant padding. The goal of this project is to characterize and analyze dynamic interaction at the human-robot interface to design the next generation of attachments for wearable robots.
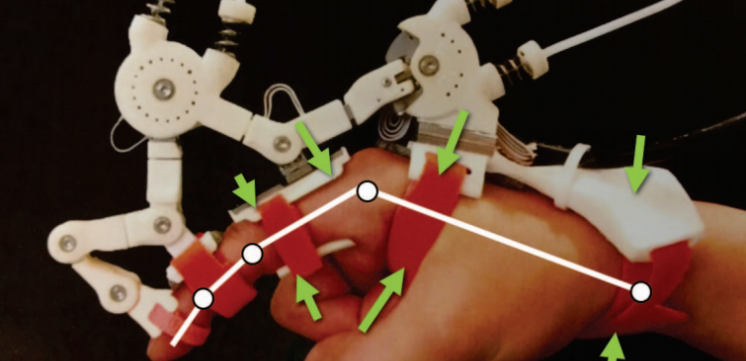
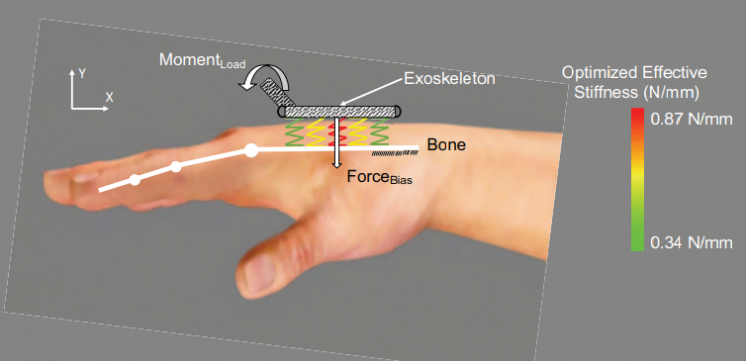
A dynamic simulation environment has been developed to include properties of human skin, underlying fascia, subcutaneous tissue, interface padding, and strap pre-tension. Given an input of applied loads from the robot, the simulation returns outputs of relative displacement and pressure distribution at all contact surfaces. The simulation has been validated with the Maestro hand exoskeleton using two pHRI interfaces across the metacarpophalangeal (MCP) joint of the index finger. The analysis methodology has been further applied to a single pHRI interface at the hand dorsum to propose a variable stiffness design paradigm that optimizes for relative displacement and pressure distribution based on human surface stiffness at the hand’s attachment interface. Future work on this project will extend the same analysis to pHRI interfaces of the Harmony upper body exoskeleton which attaches to the human at the upper arm and the wrist. We are also investigating materials and manufacturing methods for variable stiffness attachment interfaces that can further validate the pHRI interface simulation model.



