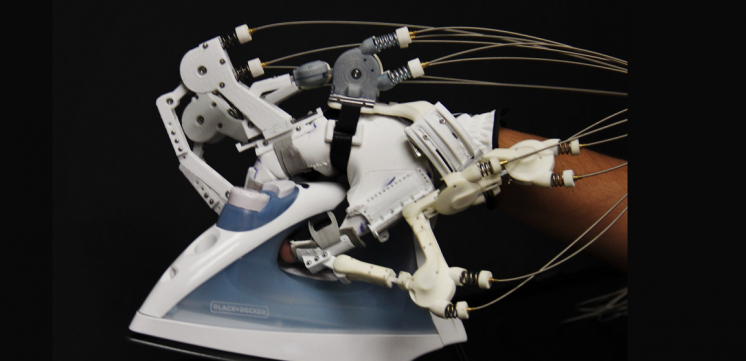
Approximately 45% of spinal cord injury (SCI) patients have difficulty performing activities of daily living (ADL) due to insufficient hand function. To address this issue, active hand orthoses are used in conjunction with measurement of user intention to assist SCI patients in performing grasping motions. We use a powered hand exoskeleton, Maestro, alongside surface electromyography (sEMG) signals for user intent recognition to provide an assistive device which can improve hand function in SCI patients.
We have previously shown that three optimal sEMG sensor locations are sufficient to differentiate between five essential hand poses that cover the majority of ADL. After classification through an artificial neural network, the intended hand pose is used in Maestro’s controller during the performance of everyday tasks by the user. We have proposed a majority vote classifier along with a probabilistic approach to enable safe and robust robot control that minimizes the risk of object drops. We have tested the overall system with multiple SCI patients and results show improvement of hand function in ADL through the Sollerman hand function test. Future work will continue validation with further subject testing to inform how Maestro can be implemented as an assistive hand orthosis for SCI patients in the clinic and at home.