

Our long term goal is to design a new generation of robotic hands with human-like compliance. In this project, our focus is on bridging the gap between the biomechanical studies and complaint robotic hand design. Variable stiffness in the robotic joint can be achieved by tuning the stiffness through software control of the actuators based on real-time feedback from position and force sensors, or by designing mechanical elements that passively vary stiffness. Although the software control strategies, such as impedance control, can, in theory, achieve any desired stiffness without any mechanical change to the system, this approach has limitations. High data bandwidth is critical and any delay in the control and sensing loops can lead to instability, especially, under un-modeled external impacts. Actuators need to expend energy to change and maintain compliance even when the robot is stationary, and there is no mechanism for storing or releasing energy. On the other hand, the variable stiffness solution achieved through clever design of mechanical elements leads to configuration based modulation in stiffness and may even be designed to be energetically efficient because of its capacity for storing and releasing energy. Given these factors, the first aim is to design a parallel joint module whose compliance changes passively based on its configuration.
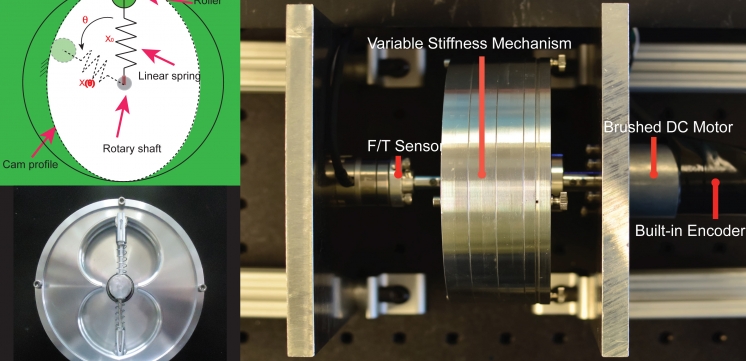
- Design I: We introduce a novel design, using linear springs and non-circular cam, for a variable stiffness joint mechanism that mimics the passive stiffness characteristics of human hand joints. We present a methodology based on the principle of virtual work for synthesizing the cam shape in the joint. Key innovations of our design are a) human-like joint stiffness profile, b) large joint range of motion, and c) modular arrangement for varying torque range. We have built a prototype for validating our approach and the experimental results demonstrate that the proposed joint mechanism fulfills the design goals of our study.
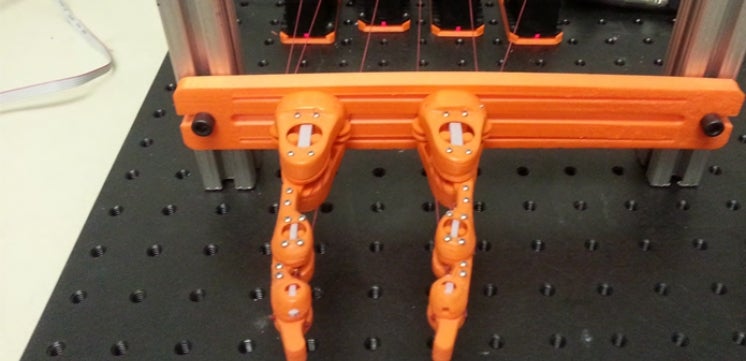
- Design II: We designed a miniaturized variable stiffness joint in order to implement the design into the robotic hands. Complaint Material: Instead of using linear or rotational springs, we used a series of pouring liquid plastic to design an energy storing element. The silicon-type of rubbers allowed us to create the complaint materials with different stiffness and non-uniform shapes for a miniaturized design. The standard, ASTM-D412, was used to derive the Young's module for the compliant materials. A pre-tensioning mechanism was also designed for the adjustment of material pretension. The compliant material was then stretched and generated the tensile force when the joint was rotated. The effective moment arm of the joint configuration changed when the joint rotated from the neutral position. Manufacturing: We used a plastic extruding-type of 3D printing technique to make the prototype. The Polylactic Acid (PLA) was used as printing material. The miniaturized joint with a nonlinear parallel compliance was realized through the design process and experimental validation. The overall size of the joint is less than 20 millimeters in diameter. The major features allows us to tune the joint stiffness profile based on customer's specifications. The presented complaint joint design is robust in mimicking the human-like compliance, and can be implemented into robotic hands due to its miniaturization and reliability.
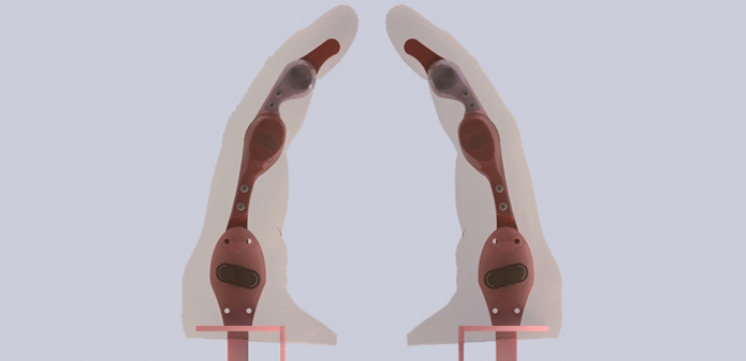
- Passive Parallel Compliant (PPC) Robotic Finger: By mimicking the passive properties derived from the human hand experiments, a novel mechanism is being designed with variable impedance for the robotic hand joints and tendon-driven system. The purely mechanical unit will introduce the human-like passive stiffness and damping profile into robotic hand design.

