
In this research, we predict human walking pattern (gait kinematics pattern) with a statistical method. So far, most of the researchers related with human gait pattern synthesis developed model-based approaches, e.g. inverted pendulum model to predict human gait pattern. These are deductive approaches. Our method is a statistical approach and the first of its kind. It uses a large-scale database to predict human gait kinematics. Therefore, it is an inductive approach.
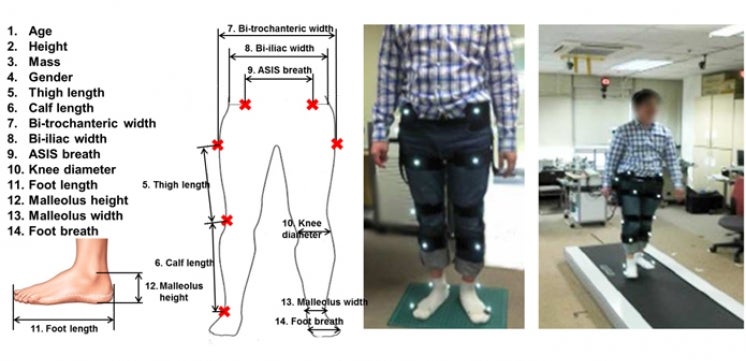
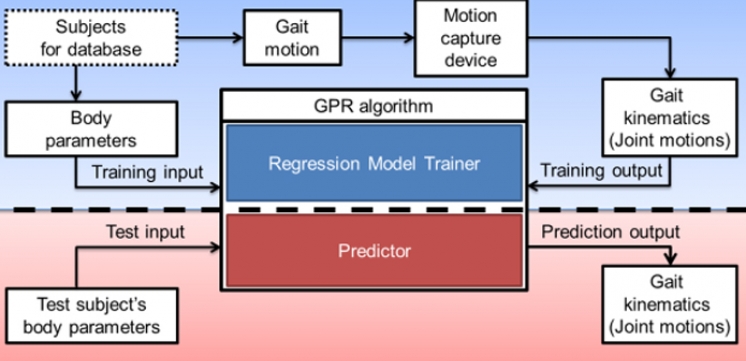
To be specific, our goal is to make a function whose input is human body parameters (e.g. height, weight) and output is gait kinematics which consists of joint motions (e.g. knee joint motion). The function is created with a statistical method.
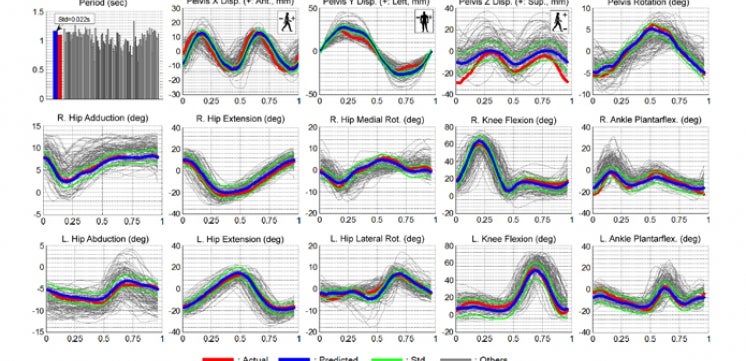
We collected human gait pattern data from 113 healthy subjects, processed and made a regression function with the Gaussian Process Regression (GPR) algorithm . For the validation of the presented method, we adopted a cross validation method. we assumed one subject’s gait kinematics datum as an unknown data, and with the other subjects data I made a regression model. Finally we repeated this procedure for all subject data.
One advantage of this method that it is a cheap prediction method because by only inputting several body parameters, we can predict the subject’s gait kinematics patterns. Second, it would be useful for generating a control trajectory of gait rehabilitation robots or humanoid robots. It provides a subject-specific gait pattern. It will help biomechanics researchers to design prosthesis or exoskeleton. Lastly, it enables us to understand about the correlation and uncertainty over human gait pattern and body parameters.
Gait Kinematics Prediction Toolbox Release
We are happy to release our "Gait Kinematics Prediction Toolbox." It predicts an arbitrary subject's gait kinematics from the man's several body parameters. The toolbox is built based on gait kinematics data of 108 healthy subjects, and using a nonlinear regression method (Gaussian Process Regress). The program is running at Matlab/Octave.
Acknowledgement:
Human gait pattern database was collected in Korean Institute of Science and Technology.
