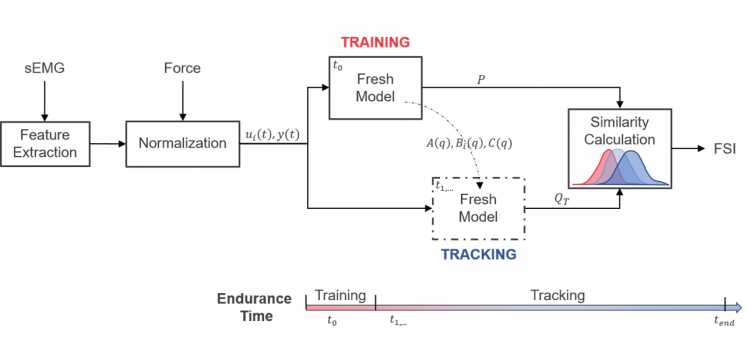

Fatigue affects individuals from all walks of life, including trained astronauts, elite athletes, and those living with a neurological or cerebrovascular disease. In both healthy and affected populations, assessing fatigue is essential to preventing neuromuscular injury, optimizing training loads, and guiding effective, individualized treatment strategies for rehabilitation. However, existing metrics for evaluating fatigue remain underdeveloped. Current techniques focus on monitoring localized muscle fatigue but do not consider the relationship between muscle fatigue and its consequences on performance. We seek to address the need for a more advanced fatigue monitoring approach by using a system-based monitoring paradigm (SBMP) to assess temporal changes in the relationship between muscle activity and associated movement output.
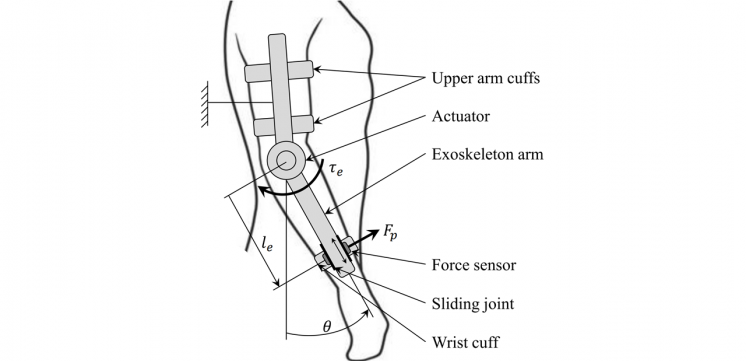
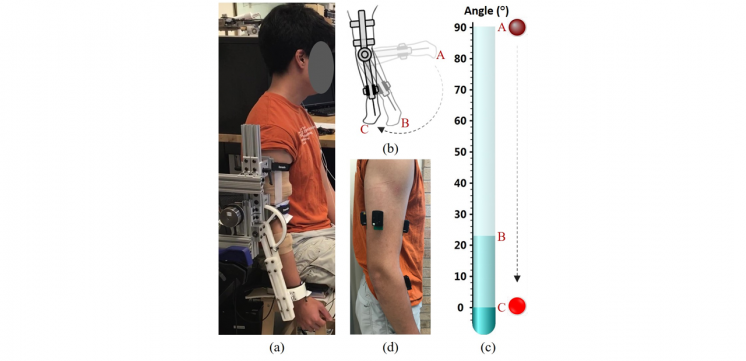
The field of robotics is especially well-suited to test and benefit from an improved fatigue assessment approach. Robotic exoskeletons are equipped with high-resolution sensors that can measure human movement outputs, such as joint kinematics and kinetics. As a result, they are promising tools for quantitatively assessing human performance. Since robotic exoskeletons are often developed for rehabilitation or human performance augmentation, monitoring fatigue during the human-robot interaction is essential to understanding how a device affects an individual’s performance.
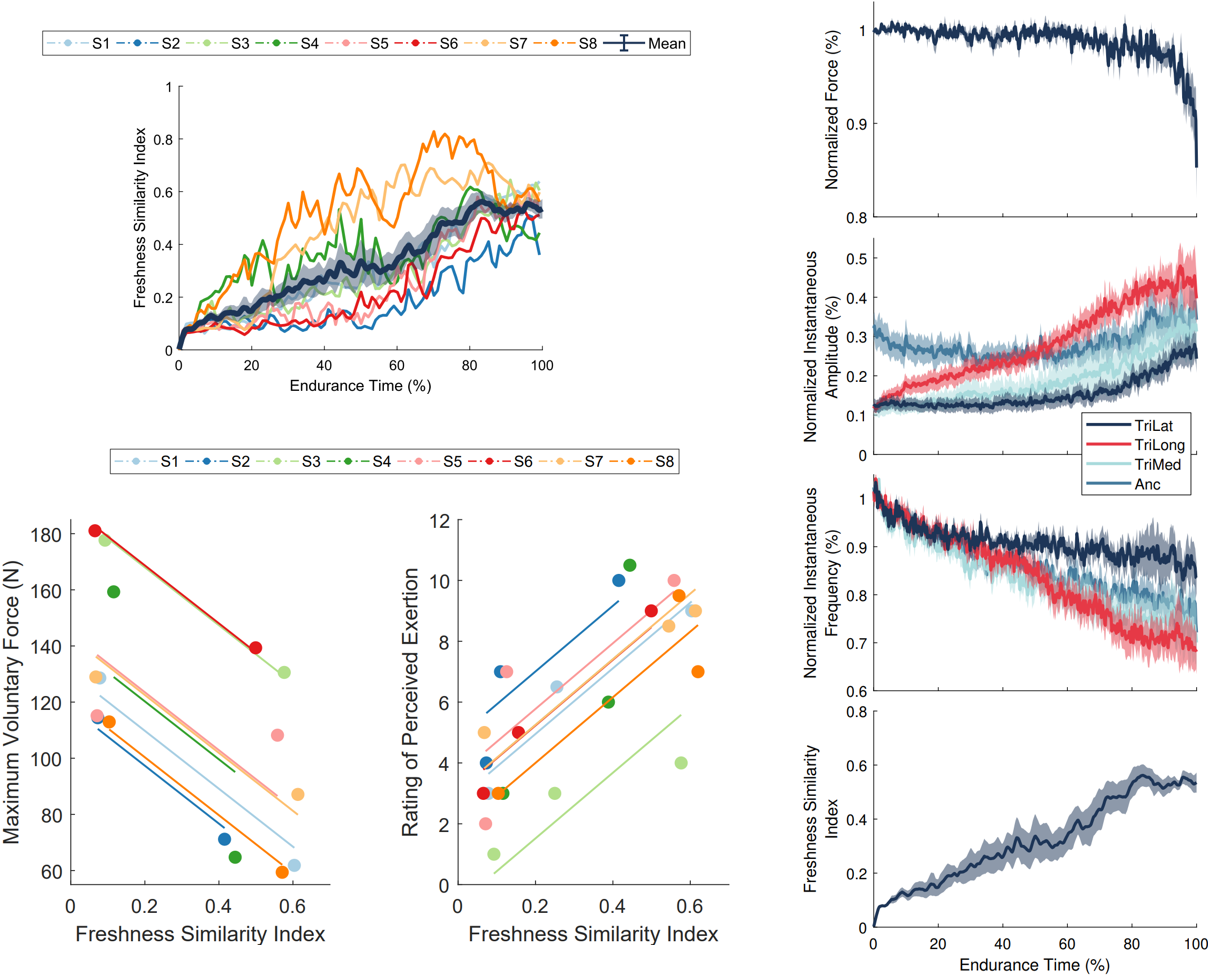
Our research aims to provide insight into the capacity of a SBMP to a) assess fatigue accurately and dependably and b) monitor fatigue-induced changes in performance when individuals interface with robotic devices. We have shown that a performance index generated by the SBMP is a valid representation of fatigue by evaluating its associations with well-established fatigue measures. To further investigate the clinical viability of the SBMP, we are working towards examining the repeatability of the performance index across multiple testing sessions. We have also demonstrated the applicability of using the SBMP to assess fatigue-induced changes in performance while individuals interface with robotic devices. In one study, the SBMP successfully monitored performance during spacesuit glove use both with and without robot-applied grasp assistance. In another study, we demonstrate how an exoskeleton can be used in a therapeutic setting to administer a resistive exercise and monitor changes in performance. Ultimately, monitoring fatigue-related changes in neuromusculoskeletal system performance can help guide more effective strategies for training and rehabilitation.
Collaborators:
- Dragan Djurdjanovic, UT Austin (https://www.me.utexas.edu/people/faculty-directory/djurdjanovic)
- Jonathan Rogers, NASA Johnson Space Center
