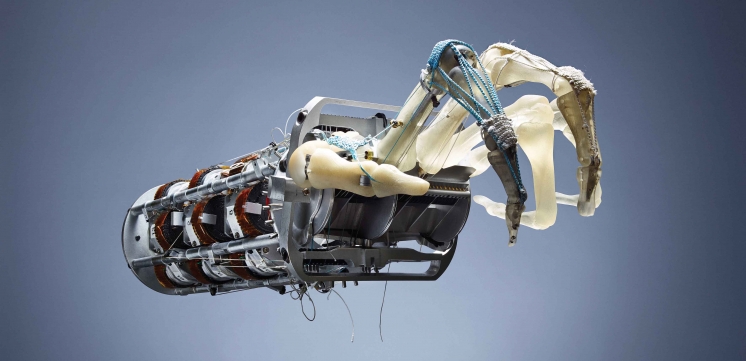
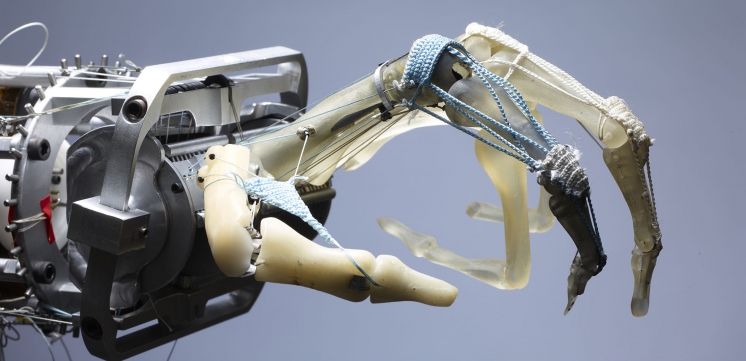
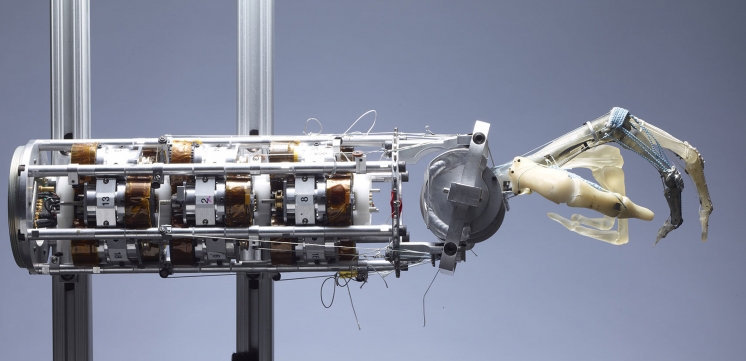
Human hands are capable of performing a variety of dexterous grasping and manipulation tasks. For example, with adequate training and practice, we can learn to play musical instruments with our hands, use chopsticks, and perform daily tasks such as cooking and writing. Dexterity is achieved in the human hand in part due to the biomechanics of the hand and in part due to the neuromuscular control. The long term goals of this project are to achieve human-like dexterity in the robotic form, and to enhance the understanding of human hand functionality through experiments with a robotic platform. Toward this goal, we have developed an Anatomically Correct Test-bed (ACT) Hand.
This hand, unlike many anthropomorphic robotic hands, incorporates neuromusculoskeletal aspects of the anatomy that are functionally crucial in order to use control signals that resemble the neural commands. These aspects include the tendon insertion points, general bone shapes, the extensor mechanisms, muscle contraction behavior, joint axes locations, joint range of motion, and the general size and weight of the human hand.
The fully functional ACT Hand platform allows for the possibility of designing and experimenting with novel control algorithms. These algorithms will lead to a deeper understanding of human dexterity as well as for advancements in current prosthetic, industrial, and personal assistance robotic hand design and control.