In addition to the controller, a lot of different physical parameters play important roles in determining the quality of manipulation. Human fingers, for example, have muscles that act as series elastic actuators and tendons that transmit the muscular forces. In between the joints, we also have joint ligaments that act independently from the muscles and provide compliance passively, acting as parallel compliance.
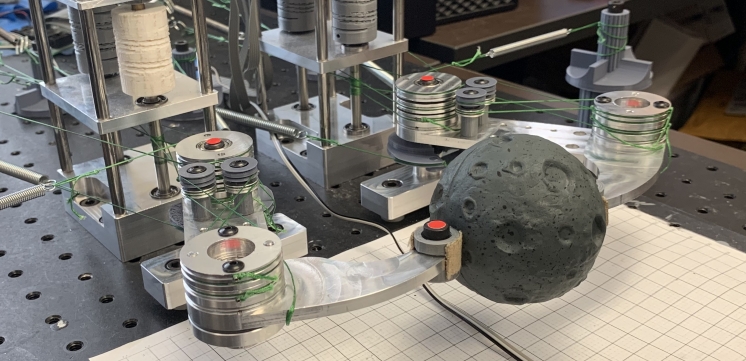
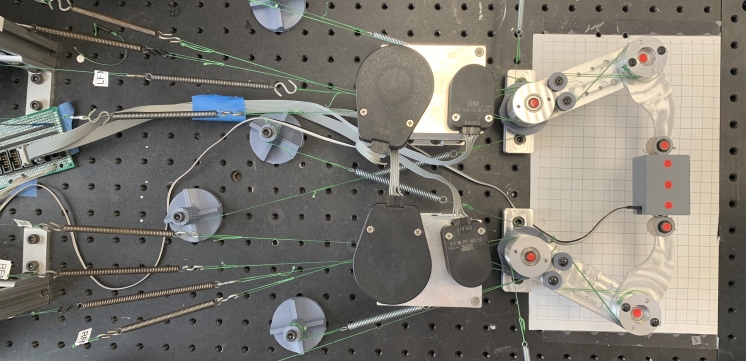
NuFingers are 2-DOF planar robotic fingers that are driven by series elastic actuators. NuFingers serves as a platform where these physical parameters are easily and intuitively adjusted. The series elasticity is adjusted via the stiffness of the springs connecting the motors and the joints of the fingers, and parallel compliance may also be installed at different joints individually. By utilizing the concept of passivity-based stability, we aim to propose the optimal design for a manipulator given a certain task that not only accomplishes the task successfully but is also energy-efficient.