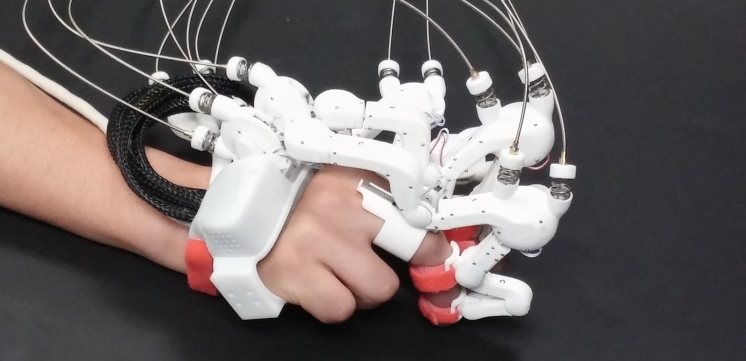
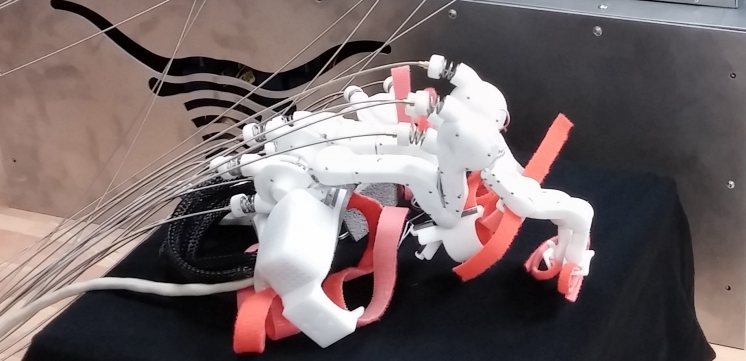
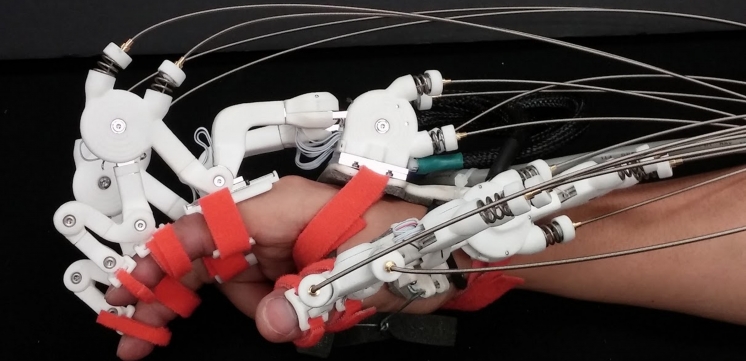
Robotic devices are excellent candidates for delivering repetitive and intensive rehabilitative motion that can restore functional capabilities of impaired upper limbs. Rehabilitation of the wrist and hand in particular are critical for the recovery of function, since the hands serve as the primary interface with the environment. However, current robotic devices that focus on hand rehabilitation are limited due to excessive cost, complexity, or limited functionality. A design and control strategy for devices that bridge this gap is critical. The goal of this research effort is to analyze the properties and role of passive dynamics in the human hand and wrist during grasping and manipulation, and then mimic these properties in a wrist-hand exoskeleton for stroke rehabilitation. The project will culminate with device testing in collaboration with rehabilitation clinicians.
A challenging problem in robotic rehabilitation is designing a device that provides assisted movement to the multiple degrees of freedom of the hand in order to restore motor coordination and function, while remaining practical for deployment in a clinical environment. Armed with a clearer understanding of the mechanisms underlying passive dynamics and control of systems exhibiting such behavior, this project will inform the design of more effective wrist/hand rehabilitation devices that are feasible for clinical use. Furthermore, such a cybernetic exoskeleton will provide a means to define quantitative metrics for recovery progress from a disability. In addition, the project creates a unique interdisciplinary environment enabling education, training, and co-advising of graduate and undergraduate students.
Collaborators:
MAHI Lab, Rice University, Houston: (http://mahilab.rice.edu)
TIRR/Memorial Hermann Hospital, Houston (http://www.memorialhermann.org/locations/tirr/)